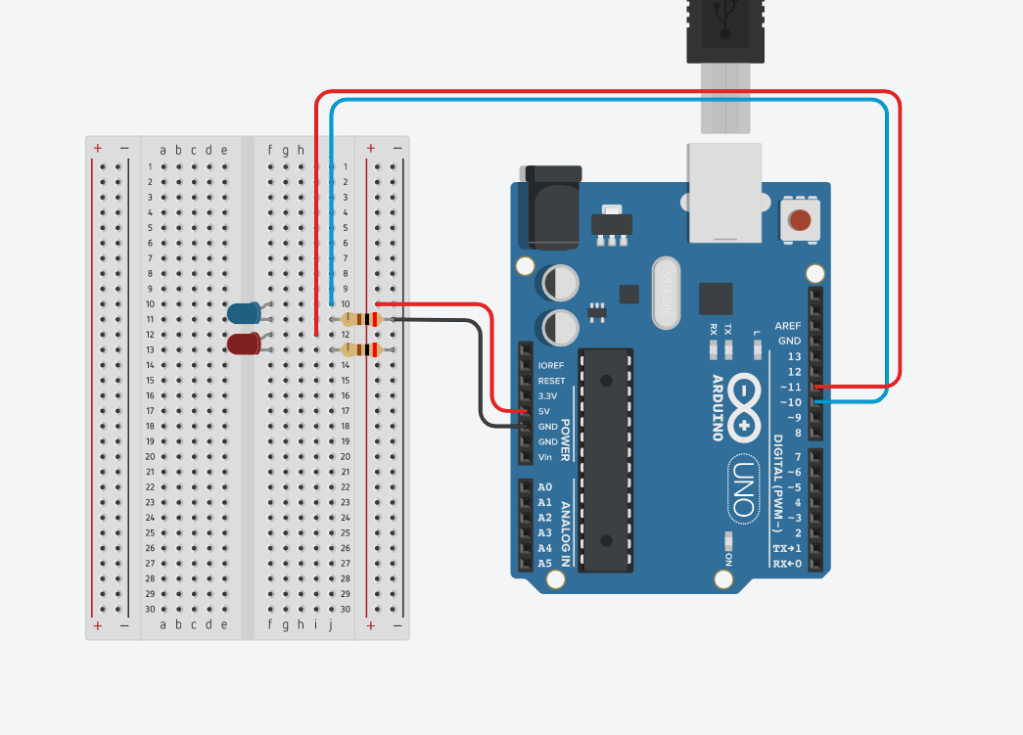
//Kode for enkelt blinklys
void setup() //her forteller vi hvilke inn/utganger som skal brukes, og hva de skal gjøre.
{
pinMode(13, OUTPUT); //Dette forteller hvilken ut/inngang den er koblet til og hva den skal gjøre
} //OUTPUT vil si at den skal gi strøm ut på den valgte porten, 13.
void loop() //dette er en kommando som sier at kommandoende skal gå om å om igjen (loop på engelsk)
{
digitalWrite(13, HIGH); //denne kommandoen slår på strømmen på port 13.
delay(1000); // Denne holder kommandoen i 1000 millisecond(s)
digitalWrite(13, LOW); //Denne slår port 13 av
delay(1000); // Og denne holder lyset av i 1000 millisekund(1 sekund)
}
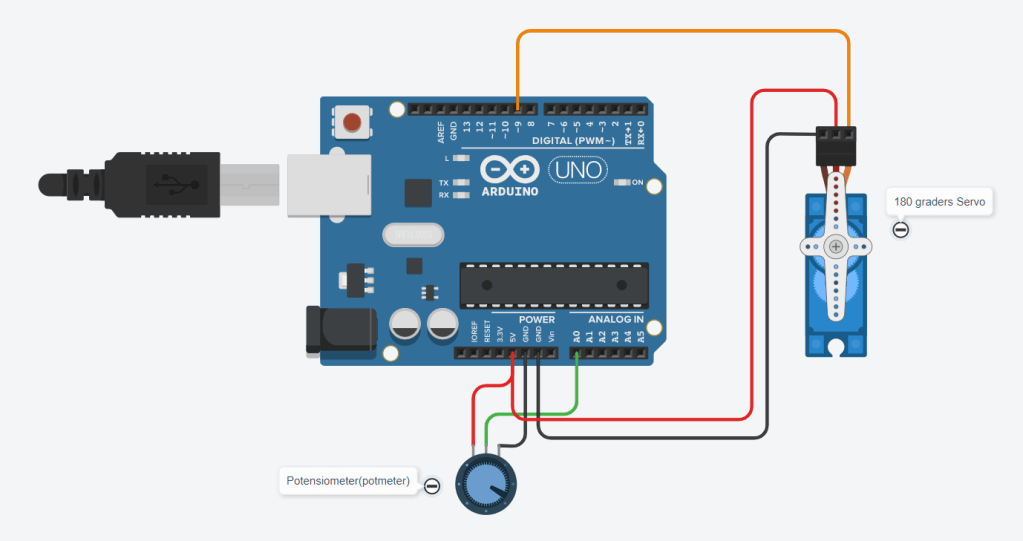
Styring av servomotor
//Eksempel på styring av roto på gravemaskin. Kan også brukes til mange andre løsninger.
#include <Servo.h> // Dette inluderer ett "bibliotek" som hjelper oss å bruke servoen ved enkle kommandoer.
Servo minservo; //Her lager vi ett navn på servoen vår som vi kaller på, "minservo" feks.
int potpin = 0; // 0 er den analoge inngangen vi bruker for og lese av verdien over potmeteret.
int verdi; // variable verdi som blir lest av potmeteret
void setup() {
minservo.attach(9); // Her bestemmer vi at signal til servo, skal ut på digitalutgang 9
}
void loop() {
verdi = analogRead(potpin); // Leser av og gjør om spenningen til en verdi fra potmeteret(verdien til potmeteret er 0 and 1023)
verdi = map(verdi, 0, 1023, 0, 180); // Gjør verdien fra potmeteret til grader på servoen. Servoen vår går fra 0-180grader.
minservo.write(verdi); // Setter posisjonen på servoen etter lest verdi.
delay(150); // tiden den bruker for å flytte seg. Denne kan fint justeres etter ønske.
}
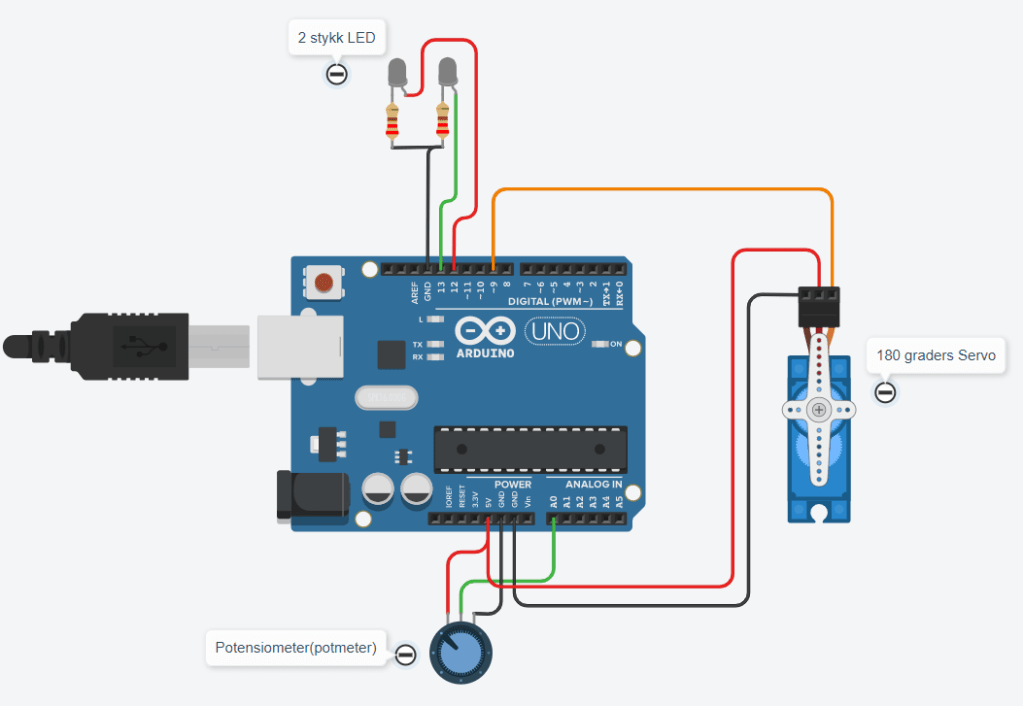
Blinklys og servostyring
//Eksempel på styring av rototilt og blinking av LED på gravemaskin.
#include <Servo.h> // Dette inluderer ett "bibliotek" som hjelper oss og bruke servoen ved enkle kommandoer.
Servo minservo; //Her lager vi ett navn på servoen vår som vi kaller på, "minservo" feks.
int potpin = 0; // 0 er den analoge inngangen vi bruker for å lese av verdien over potmeteret.
int verdi; // variable verdi som blir lest av potmeteret
void setup() {
minservo.attach(9); // Her bestemmer vi at signal til servo, skal ut på dititalutangag 9
pinMode(13, OUTPUT); //Gir strøm ut på utgang 13 Altså LED
pinMode(12, OUTPUT); //Gir strøm ut på utgang 12 Altså LED
}
void loop() {
verdi = analogRead(potpin); // Leser av og gjør om spenningen til en verdi fra potmeteret(verdien til potmeteret er 0 and 1023)
verdi = map(verdi, 0, 1023, 0, 180); // Gjør verdien fra potmeteret til grader på servoen. Servoen vår går fra 0-180grader.
minservo.write(verdi); // Setter posisjonen på servoen etter lest verdi.
delay(50); // tiden den bruker for og flytte seg. Denne kan fint justeres etter ønske.
digitalWrite(13, HIGH); //denne kommandoen slår på strømmen på port 13.
delay(200); // Denne holder kommandoen i 1000 millisecond(s)
digitalWrite(13, LOW); //Denne slår port 13 av
delay(200); // Og denne holder lyset av i 1000 millisekund(1 sekund)
digitalWrite(12, HIGH); //denne kommandoen slår på strømmen på port 12.
delay(200); // Denne holder kommandoen i 1000 millisecond(s)
digitalWrite(12, LOW); //Denne slår port 12 av
delay(50); // Og denne holder lyset av i 1000 millisekund(1 sekund)
}
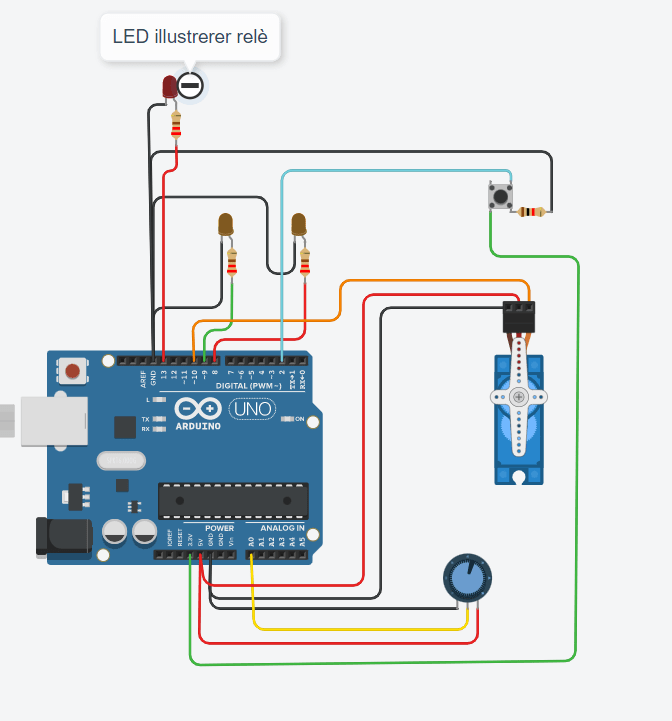
Båtmotor med styring via rele.
//Eksempel på båtmotor med styring. Styrt av knapp
#include <Servo.h> // Dette inluderer ett "bibliotek" som hjelper oss og bruke servoen ved enkle kommandoer.
Servo minservo; //Her lager vi ett navn på servoen vår som vi kaller på, "minservo" feks.
int potpin = 0; // 0 er den analoge inngangen vi bruker for å lese av verdien over potmeteret.
int verdi; // variable verdi som blir lest av potmeteret
int rele = 13;
int pushButton = 2;
void setup() {
Serial.begin(9600);
minservo.attach(10); // Her bestemmer vi at signal til servo, skal ut på dititalutangag 9
pinMode(8, OUTPUT); //Gir strøm ut på utgang 8 Altså LED
pinMode(9, OUTPUT); //Gir strøm ut på utgang 9 Altså LED
pinMode(pushButton, INPUT);
pinMode(rele, OUTPUT);
}
void loop() {
int buttonState = digitalRead(pushButton);
Serial.println(buttonState);
if (buttonState == 1) {
digitalWrite(rele, HIGH); // slår på rele
} else {
digitalWrite(rele, LOW); // slår av rele
}
delay(1); // forsinkelse for stabilitet
verdi = analogRead(potpin); // Leser av og gjør om spenningen til en verdi fra potmeteret(verdien til potmeteret er 0 and 1023)
verdi = map(verdi, 0, 1023, 0, 180); // Gjør verdien fra potmeteret til grader på servoen. Servoen vår går fra 0-180grader.
minservo.write(verdi); // Setter posisjonen på servoen etter lest verdi.
delay(50); // tiden den bruker for og flytte seg. Denne kan fint justeres etter ønske.
digitalWrite(9, HIGH); //denne kommandoen slår på strømmen på port 13.
delay(200); // Denne holder kommandoen i 1000 millisecond(s)
digitalWrite(9, LOW); //Denne slår port 9 av
delay(200); // Og denne holder lyset av i 1000 millisekund(1 sekund)
digitalWrite(8, HIGH); //denne kommandoen slår på strømmen på port 12.
delay(200); // Denne holder kommandoen i 1000 millisecond(s)
digitalWrite(8, LOW); //Denne slår port 8 av
delay(50); // Og denne holder lyset av i 1000 millisekund(1 sekund)
}